WEBカタログ
製品一覧
- エアマネジメントシステム
- 方向制御機器
-
エアシリンダ
- 選定ガイド(絞り込み)
- 標準形エアシリンダ(丸形)
- 標準形エアシリンダ(角形カバー)
- コンパクトエアシリンダ
- 耐環境仕様シリンダ
- フローティングジョイント/ロッドエンド
- 駆動制御機器
- メカジョイント式ロッドレスシリンダ
- マグネット式ロッドレスシリンダ
- テーブル付シリンダ
- ガイド付シリンダ
- デュアルロッドシリンダ
- ロック付シリンダ/エンドロック付シリンダ
- ファインロックシリンダ
- 特殊シリンダ
- クランプシリンダ
- ピンシフトシリンダ
- ストッパシリンダ
- 計測シリンダ
- バルブ付エアシリンダ
- ISOシリンダ ISO規格(6432)準拠
- ISOシリンダ ISO規格(15552)準拠
- ISOシリンダ ISO規格(21287)準拠
- ショックアブソーバ
- エアハイドロユニット
- オートスイッチ
- 無線オートスイッチ
- アクチュエータ位置センサ
- ロータリアクチュエータ/エアチャック
- 電動アクチュエータ/電動シリンダ
- 真空用機器
- 協働ロボット用グリッパ
- 圧縮空気清浄化機器、ドライヤ
- コンパクトコンプレッサ
- モジュラF.R.L./圧力制御機器
- モジュラF.R.L.
- 圧力制御機器
- 増圧弁
- 潤滑機器
- 気体発生装置
- 管継手&チューブ
- 駆動制御機器
- サイレンサ/エキゾーストクリーナ/圧力計
- エアブロー用機器
- スイッチ/センサ/コントローラ
- 静電気対策機器/イオナイザ(除電機器)
-
産業用通信機器/無線システム
- 産業用通信機器/無線システム PROFINET 対応機器
- 産業用通信機器/無線システム EtherNet/IP 対応機器
- 産業用通信機器/無線システム EtherCAT 対応機器
- 産業用通信機器/無線システム IO-Link 対応機器
- 産業用通信機器/無線システム CC-Link 対応機器
- 産業用通信機器/無線システム DeviceNet 対応機器
- 産業用通信機器 PROFINET 対応機器
- 産業用通信機器 EtherNet/IP 対応機器
- 産業用通信機器 EtherCAT 対応機器
- 産業用通信機器 Modbus TCP 対応機器
- 産業用通信機器 ETHERNET POWERLINK 対応機器
- 産業用通信機器 CC-Link IE Field 対応機器
- 産業用通信機器 SSCNET III 対応機器
- 産業用通信機器 MECHATROLINK-Ⅲ 対応機器
- 産業用通信機器 PROFIsafe 対応機器
- 産業用通信機器 CIP Safety 対応機器
- 産業用通信機器 IO-Link 対応機器
- 産業用通信機器 PROFIBUS 対応機器
- 産業用通信機器 DeviceNet 対応機器
- 産業用通信機器 CC-Link 対応機器
- 産業用通信機器 AS-interface 対応機器
- 産業用通信機器 CompoNet 対応機器
- 産業用通信機器 Interbus 対応機器
- 産業用通信機器 MECHATROLINK-Ⅱ 対応機器
- その他 RS232C 対応機器
- その他 RS485 対応機器
- 産業用通信機器/無線システム PROFINET 対応機器
- 流体制御用機器
- 薬液用バルブ/管継手&ニードルバルブ/チューブ
- プロセスポンプ(ダイヤフラムポンプ)
- 温調機器
- プロセスガス用機器 AP Tech
- 高真空機器
- 工業用フィルタ/焼結金属エレメント
- 計装用補助機器
- 油圧機器
テーマ・業種別カタログ
エアチャック(平行開閉形)
 一覧
一覧 写真
写真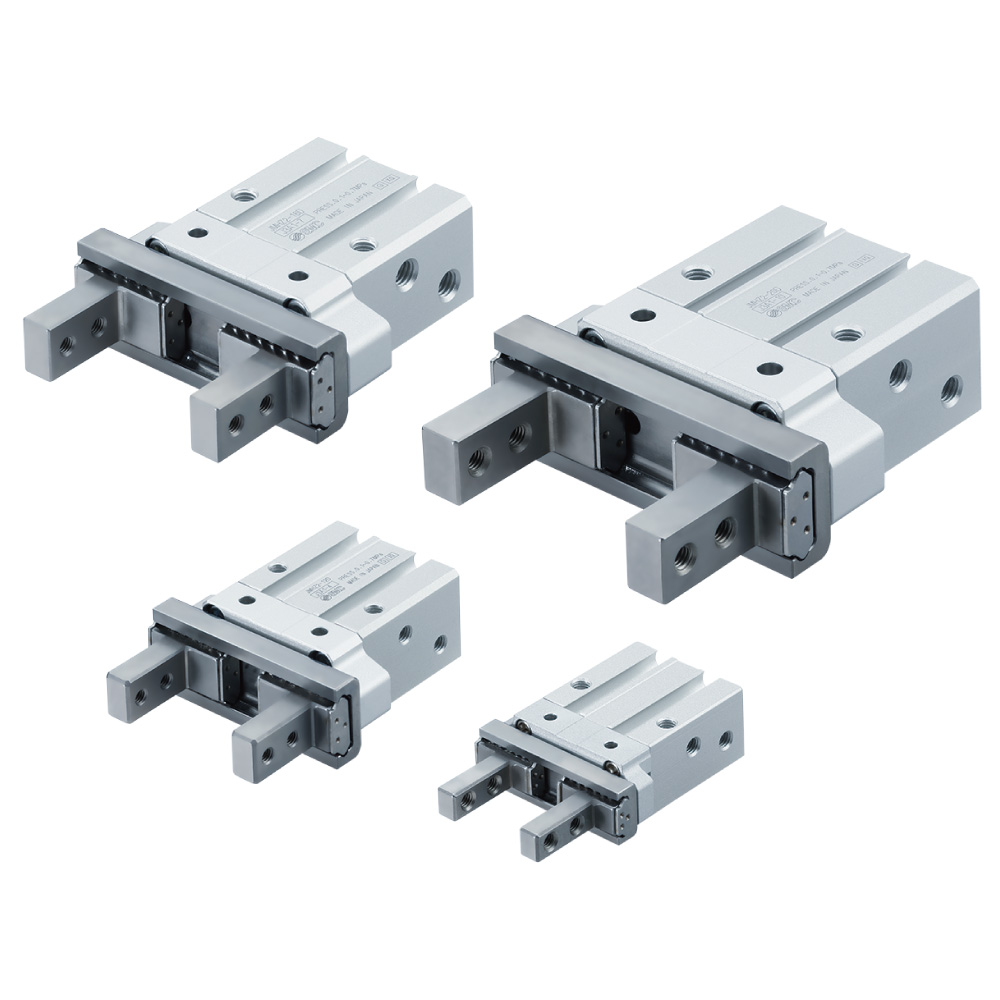
平行開閉形エアチャック/コンパクトタイプ
JMHZ2
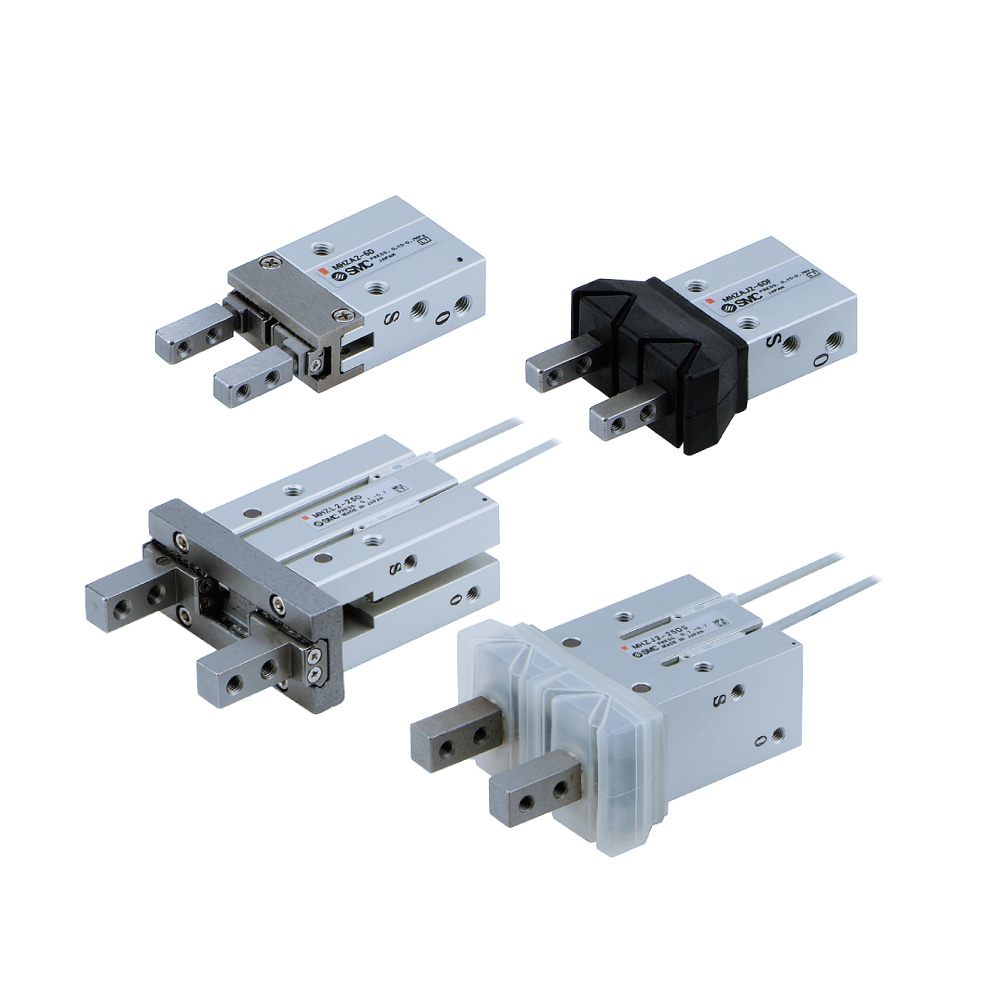
リニアガイド平行移動タイプエアチャック
MHZ□2

協働ロボット用エアグリッパ/標準タイプ
RMHZ2

クロスローラ平行移動
MHQ□2

薄形エアチャック
MHF2

協働ロボット用エアグリッパ/ロングストロークタイプ
RMHF2

薄形エアチャック/片爪固定タイプ
MHF2-□F

エアチャック/フィンガチェンジ機能付
MHF2-X7076A

平行開閉形エアチャック/幅広タイプ
MHL2
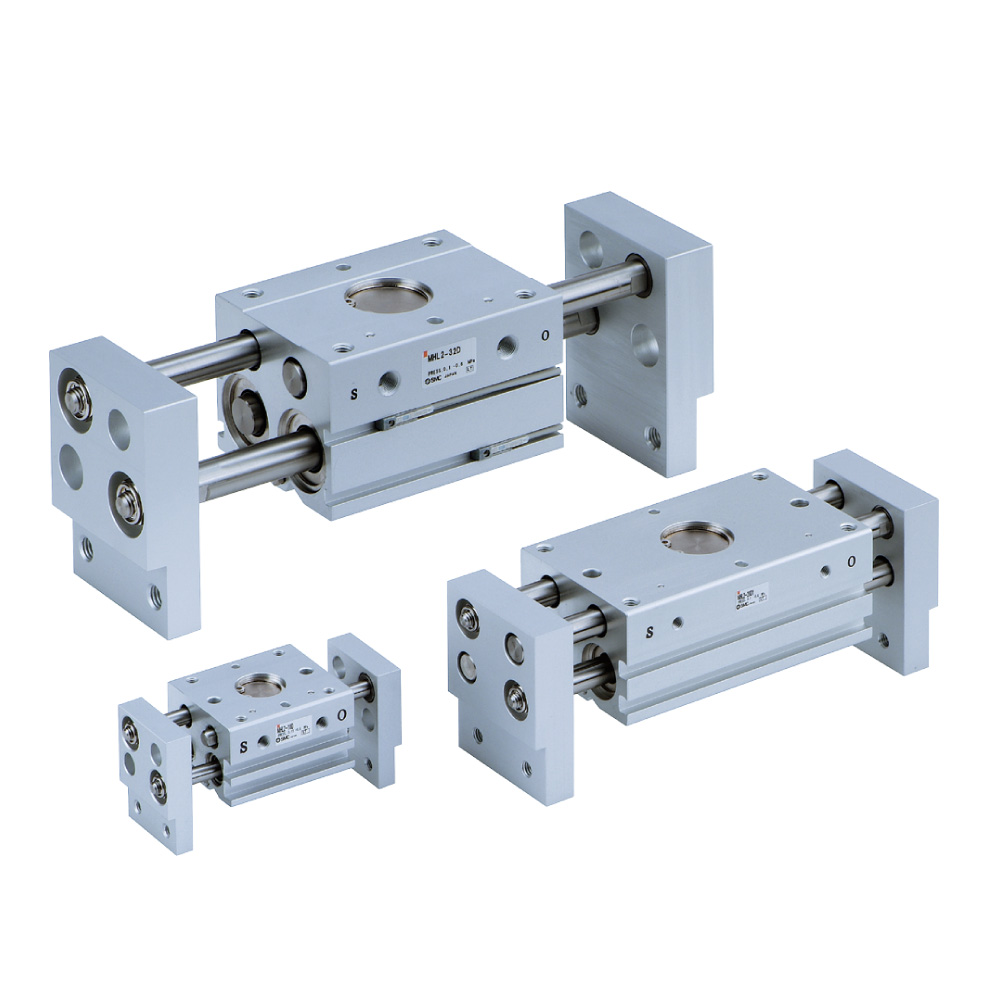
幅広タイプエアチャック
MHL2

ロータリ駆動形2爪タイプエアチャック
MHR2/MDHR2

ロータリ駆動形3爪タイプエアチャック
MHR3/MDHR3

スライドガイド方式2爪タイプエアチャック
MHK2

スライドガイド方式2爪タイプエアチャック
MHS2
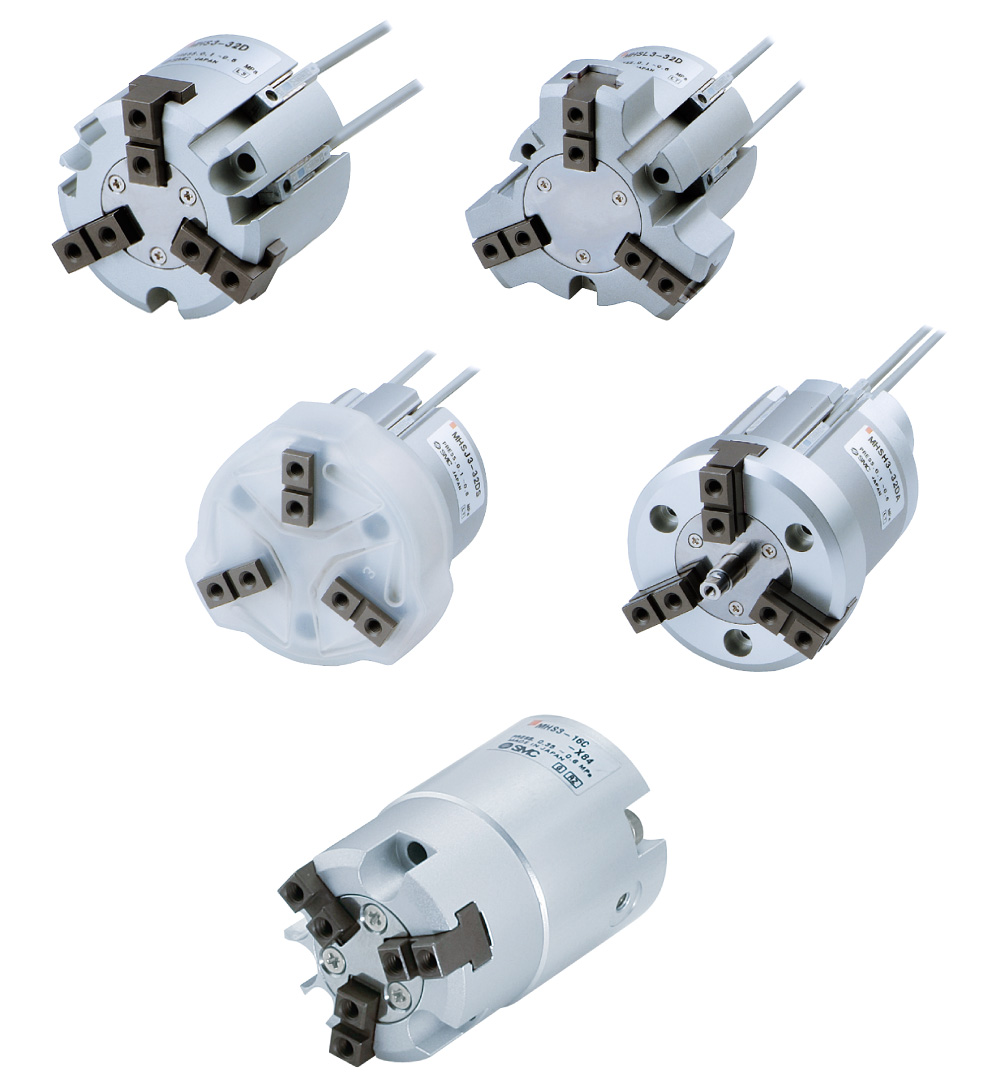
スライドガイド方式3爪タイプエアチャック
MHS3

耐環境3爪エアチャック
MHS3-X6708□

協働ロボット用エアグリッパ/3爪タイプ
RMHS3

スライドガイド方式4爪タイプエアチャック
MHS4
耐環境 オーダーメイド仕様
