












空氣夾爪
 清單
清單 照片
照片Electric Vacuum Gripper for Collaborative Robots (zh-tw) ZXPE5

-
・A vacuum gripper that doesn't require an air source
・Operation possible by simply connecting an electrical wire connector
Can be used without an air source due to the built-in vacuum pump
・Unitization of the peripheral devices required for adsorption
The vacuum pump, atmospheric release valve, pressure monitor,
and cups have been integrated.
・Current consumption: Max. 64% reduction
Energy-saving operation possible via automatic/manual modes
・Lightweight: 556 g
・A wide variety of cup variations are available to support a wide range of
workpiece shapes.
・Standards: Conforming to ISO9409-1-50-4-M6
∗1 These are the values under SMC measurement conditions when the gripper is in continuous mode (the vacuum pump working continuously) and may vary depending on the
atmospheric pressure (weather, altitude, etc.) and the measurement method.
∗2 May be restricted depending on the cup diameter, mounting orientation, or workpiece. Please use within the max. work load. Suction and transfer exceeding the max. work load may result in product failure and the dropping of workpieces.
Safety Instructions Vacuum Equipment/Precautions Series Variations/Model Selection
Green Procurement (RoHS)
Green Procurement (RoHS)
| Series | Cup form | Cup diameter | Max. suction flow rate*1 [L/min(ANR)] | Max. work load*2 |
|---|---|---|---|---|
| ZXPE5 | Flat Flat with rib Bellows Thin flat Multistage bellows 2.5-stage bellows 5.5-stage bellows Flat type for film packaging workpieces | φ8 to φ32 | 4.5 | 5 |
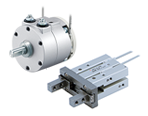
Air Gripper for Collaborative Robots/Standard Type RMHZ2

-
・Unitization of the peripheral devices required for gripper driving
Operation is possible simply by connecting 1 air supply tube and 1
electrical wire.
Built-in solenoid valve, exhaust throttle valve with silencer, auto switch,
fitting, etc.
・Can be used with the collaborative robots of 12 companies
UNIVERSAL ROBOTS, OMRON/TECHMAN ROBOT, FANUC, YASKAWA
Electric, Mitsubishi Electric, HAN’S ROBOT, KUKA, DOOSAN ROBOTICS,
SIASUN, JAKA, AUBO, ABB
・Manual changer built in as standard
Allows for easy tool changing and labor saving
・Air consumption reduced by up to 80%
・High rigidity and precision are achieved by integrating the guide and
finger.
・With high-precision linear guide
| Series | Number of fingers | External gripping force [N] | Internal gripping force [N] | Opening/Closing stroke (Both sides) [mm] |
|---|---|---|---|---|
| RMHZ2 | 2 | 54.2 | 72.2 | 14 |
Air Gripper for Collaborative Robots/Long Stroke Type RMHF2

-
・Unitization of the peripheral devices required for gripper driving
Operation is possible simply by connecting 1 air supply tube and 1
electrical wire.
Built-in solenoid valve, exhaust throttle valve with silencer, auto switch,
fitting, etc.
・Can be used with the collaborative robots of 12 companies
UNIVERSAL ROBOTS, OMRON/TECHMAN ROBOT, FANUC, YASKAWA
Electric, Mitsubishi Electric, HAN’S ROBOT, KUKA, DOOSAN ROBOTICS,
SIASUN, JAKA, AUBO, ABB
・Manual changer built in as standard
Allows for easy tool changing and labor saving
・Air consumption reduced by up to 80%
・The 64 mm long stroke is ideal for a variety of workpieces.
・Height reduced by approx. 35% (Compared with the standard type)
・Actuator position sensor mountable
| Series | Number of fingers | External gripping force [N] | Internal gripping force [N] | Opening/Closing stroke (Both sides) [mm] |
|---|---|---|---|---|
| RMHF2 | 2 | 90 | 90 | 64 |
Air Gripper for Collaborative Robots/3-Finger Type RMHS3

-
・Unitization of the peripheral devices required for gripper driving
Operation is possible simply by connecting 1 air supply tube and 1
electrical wire.
Built-in solenoid valve, exhaust throttle valve with silencer, auto switch,
fitting, etc.
・Can be used with the collaborative robots of 12 companies
UNIVERSAL ROBOTS, OMRON/TECHMAN ROBOT, FANUC, YASKAWA
Electric, Mitsubishi Electric, HAN’S ROBOT, KUKA, DOOSAN ROBOTICS,
SIASUN, JAKA, AUBO, ABB
・Manual changer built in as standard
Allows for easy tool changing and labor saving
・Air consumption reduced by up to 80%
・Suitable for axial gripping of cylindrical workpieces
| Series | Number of fingers | External gripping force [N] | Internal gripping force [N] | Opening/Closing stroke (Both sides) [mm] |
|---|---|---|---|---|
| RMHS3 | 3 | 118 | 130 | 8 |
Multi Hand Adapter RMMA

| Series | Mounting angle | Max. work load (kg) |
|---|---|---|
| RMMA | 90°,120°,180° | 20 |
Tool Changer/Auto Type RMTA

-
·Robot hand tool automatic exchange
· Standards: ISO9409-1 compliant
Support for direct mounting on collaborative robots
· Robot and end tool connection/release
· More compact as flanges are not required.
Direct mounting on collaborative robots eliminates the need for flanges
and reduces design labor
·Supports a work load of up to 20 kg (Work load: 5 kg, 10 kg, 20 kg)
| Type | Series | Work load (kg) | Repeatability (Position reproducibility) |
|---|---|---|---|
| RMTA | Auto Type | 5,10,15 | ±0.01 |
Tool Changer One-push Type/Clamp Type RMTM

-
·2 types of manual tool changers
· One-push Type
Tools can be attached/removed by the push of a button (no tools
required).
Work load: 10 kg
Repeatability: ±0.01 (Position reproducibility)
· Clamp Type
Tools can be attached/removed by clamper bolts (2 pcs).
Work load: 20 kg
Repeatability: ±0.02 (Position reproducibility)
·Standards: ISO9409-1-50-4-M6 compliant
Compatible with the flanges of most major collaborative robots
·Compact, Lightweight
| Type | Series | Work load (kg) | Repeatability (Position reproducibility) |
|---|---|---|---|
| One-push type | RMTM1 | 10 kg | ±0.01 |
| Clamp type | RMTM2 | 20 kg | ±0.02 |

